Math'φsics
Acceuil
Maths
Physique
Maths
Physique
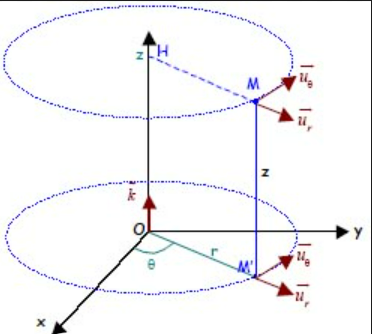
Système de coordonnées cylindriques
Formulaire de report
Problème d'affichage
Contenu de la note peu pertinent
Vecteur position:
$$\overrightarrow {OM}= {{\overrightarrow {OM'}+\overrightarrow{M'M} }}$$
$$\overrightarrow {OM}={{r\vec e_r+z\vec k}}$$
Vecteur vitesse:
$$\vec v=\frac{d(r\vec e_r+z\vec k)}{dt}$$
$$\vec v={{\dot r\vec e_r+r\dot \theta\vec e_\theta+\dot z\vec k}}$$
Vecteur accélération:
$$\vec a={{(\ddot r-r\dot \theta^2)\vec e_r+(r\ddot\theta+2\dot r\dot \theta)\vec e_\theta+\ddot z\vec k}}$$
Si \(z=0\) \(\implies\) Base polaire
Rétroliens :
Elements de cinématique du point matériel
Système de coordonnées